Canopy in the Dynisma DiL
July 12, 2022
by Rowland Jowett
As a former senior simulator test engineer I have spent many a day preparing for the next race event with F1 champions, Lewis Hamilton, Fernando Alonso and Jenson Button, in the driver-in-loop (DiL) simulator. I have become well accustomed to the strengths and limitations of running a top spec DiL. Working with this level of equipment sets the bar extremely high and it is not every day that I get to experience next-generation hardware that is truly game changing.
Now I am working with the most advanced laptime simulation tools available in the motorsport industry, I enjoy the elegant clarity that comes from being able to zoom in on the data from two computer simulated laps and resolve the differences to within a few milliseconds, and furthermore identify where the laptime gains originate.
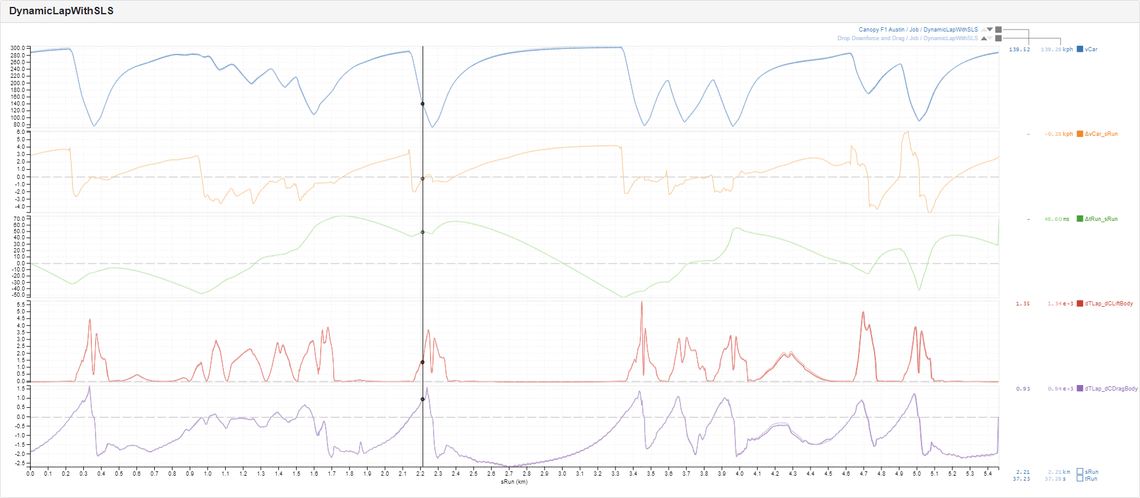
Dynamic Lap will resolve the laptime difference to a few milliseconds. The secondary laptime sensitivity channels (red and purple) identify where these gains originate from; for every meter around the track these channels show how much laptime there is to be found from a change in Lift, Drag, or any other parameter.
With my head in the cloud-based simulation world it is all too easy to forget that ultimately it is a real driver who has to deliver this performance on track and get as close to this perfect simulated lap as possible with near metronomic precision lap upon lap.
This leaves a bit of a gap between the theoretically best setup, as provided by Canopy and the execution that takes place on a Sunday afternoon. This is where the DiL simulator steps in to fill the void and close the loop between simulation and reality. There are three great reasons to own a DiL:
Circuit practice and familiarisation. There is great value to be gained from knowing where the corners go. An accurate track model and an advanced gaming rig goes a long way and I’ve worked with a number of drivers who have practiced in this way.
Procedural execution. Being able to work with the engineers over the radio and use the actual car steering wheel brings about additional benefits. Practicing energy deployment, for example, is a good use of time.
Car balance, setup, correlation and design of future car concepts. This is where it gets really engaging from an engineering standpoint. Points 1 and 2 can be ticked off with relatively modest hardware, but if you want the driver to resolve the through corner balance effect of changing camber by a quarter of a degree then some seriously impressive hardware is required. At this level of sophistication, the driver can deliver feedback on whether the theoretical simulated benefit of setup A can be realised over setup B. The loop gets elegantly closed when the driver debriefs after a race weekend in the DiL and their advice can be used to tune the car model parameterisation, which in turn will give better laptime predictions and a more productive DiL session in preparation for the next race.
One thing that has baffled me, based on my previous experience of “driving”, ahem, spinning, the DiL in preparation for race and test driver days, is how difficult it might be for a mortal to drive an F1 car. I’m not talking about a top 10 qualifying effort, merely just keeping the car on the track. Sure, there are procedural complexities in getting the tyres and brakes to the correct operating temperature, but given that in software one can magically appear on track with the tyres initialised in the correct window without preparation, it should at least be possible to drive around at a pedestrian pace. After all, Richard Hammond managed it in a real car so it should be easy in a no-consequence virtual world.
Surprisingly, it might actually be harder in the DiL. I can’t say for sure, because I haven’t driven the actual car, but I have witnessed the failed attempts and frustrations of many F1 drivers trying to set a DiL lap record.

When it doesn’t feel like driving the real thing, it’s hard to persevere.
I have worked with a number of top-class drivers who have been several seconds off the pace in the DiL. It is completely unrealistic that they would maintain a career in the upper echelons of motorsport if their race day performance was even a few tenths off-par. So why is their DiL execution lacking, and why do other drivers manage it with relative ease?
This comes down to the information that the DiL is providing. In reality the driver is exposed to the full spectrum of forces that the car experiences, but in the DiL these cues are diminished, making it a challenge to piece the picture together from the subset of the information that would normally be available. The reason why some drivers are better in the DiL is because they have spent years getting accustomed to the attenuated forces that can be felt in racing games. This is disappointing, the illusion should be maintained such that DiL and track experience are well aligned, rather than being distinct activities.
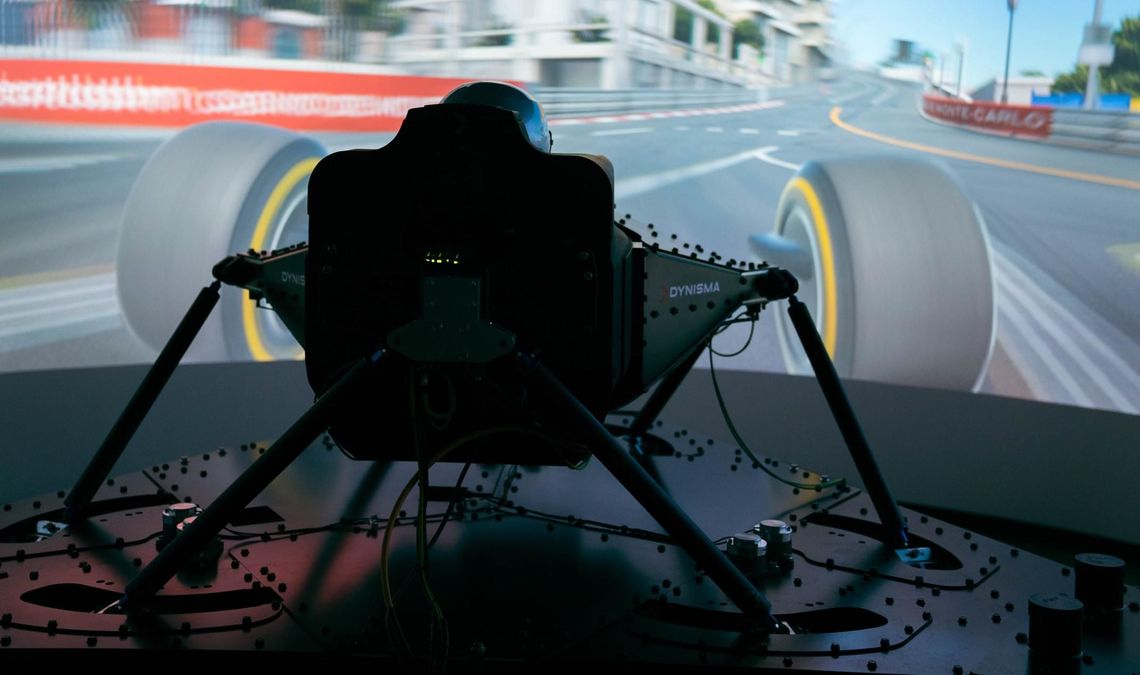
Recently, I had the pleasure of driving the Canopy vehicle model in Dynisma’s DMG-1 DiL platform (video of DMG-1 in action here), this was an experience unlike any other DiL I’ve driven. It is the accumulation of over a man-century worth of simulation and DiL specialism. The secret is in the cueing. Bandwidth and latency are the enemies; if insufficient information is getting through to the driver, or it is too late then car will be backward in a barrier before the driver has had chance to react.

It is night and day easier to drive DMG-1 than the DiL that I previously worked with in my role as Senior Simulator Test Engineer for an F1 team. While I feel some degree of frustration that there is now an off the shelf product that is better than the bespoke system that our team of five engineers lovingly polished, it is fantastic that Dynisma are making the absolute cutting edge available to everyone. In many ways they are doing for DiL rigs what we’ve done here at Canopy for simulations. No longer shrouded by mystery, or the barrier of years of development, these technologies are available immediately for any racing team that wants to get ahead.
While driving DMG-1 I felt immediately at home without needing familiarisation time. This is a major bonus, because during race driver debrief, if it takes too long to adapt to the DiL then the driver’s knowledge is clouded and their valuable feedback is diluted. It was easy to drive; I caught a big slide through Eau Rouge, and I could control low speed on power oversteer. Upon pressing the DRS button, the chassis would react to the downforce change, where previously I’d have had to rely on the DRS light to convince myself that it was active. Cueing of oversteer, low-speed entry instability on braking, traction, and in particular high-speed slides (where there is less time to react) were the Achilles heel of the DiL that I previously worked in, but this has all been addressed by DMG-1.
It is highly satisfying that this isn’t done with supercomputers, or tweaks to the car physics required to make F1 racing games drivable. I have no doubt that the Dynisma team have put an enormous effort into their motion cueing algorithms, but fundamentally this cueing advantage seems to be built into the rig hardware, which is highly satisfying because the physics of the vehicle model can remain true to form.
The big revolution here is that drivers should be able to closely match what goes on at the track, and the fidelity for identifying car performance gains is enhanced. If you don’t believe me, perhaps the fact that this is the virtual test environment of choice for Charles Leclerc and Carlos Sainz should speak volumes. Although, as I experienced when driving this next-generation DiL, maybe the real car isn’t that hard to drive after all!
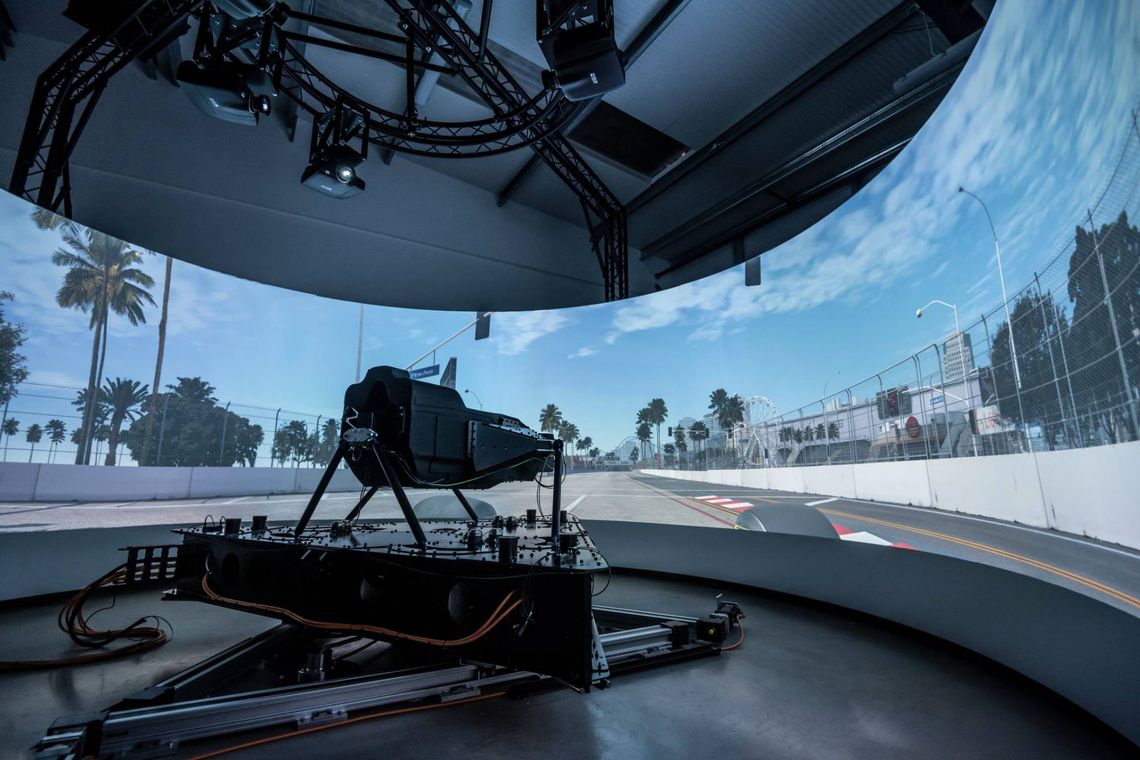
The driving experience is more natural in the next-generation DMG-1 DiL: