4WD KERS for F1 2021?
FEBRUARY 28, 2018
As with any change to the F1 regulations, 2021 represents another opportunity to improve the racing spectacle, so we were interested to see if four-wheel-drive KERS could improve overtaking.
Our simulations suggest that four-wheel-drive in the form of a front-axle kinetic energy recovery system (KERS) could be worth 2.2 sec per lap in Qualifying around Barcelona. This is based on adding 60kW electric motors diving each of the front wheels and allowing for an increase in car mass. Current 120kW KERS systems weigh up to 30kg, so we would expect an additional front KERS system which makes use of the existing energy storage system (ESS) and consists of 2 x 60kW motors and driveshafts to come in at less than 50kg.
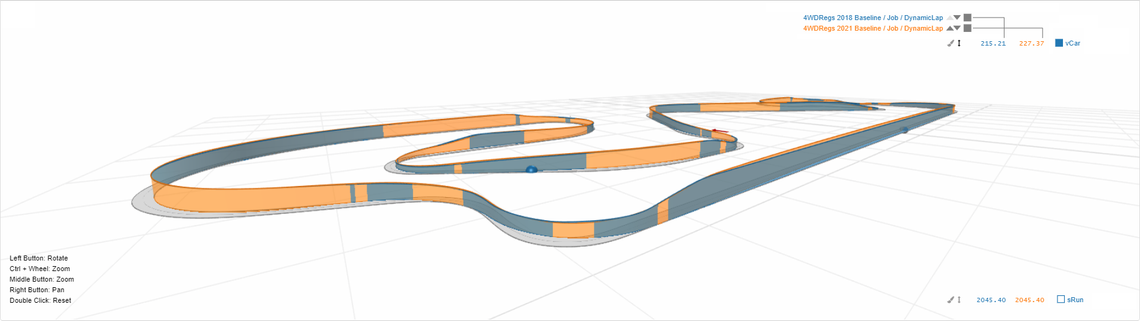
Figure 1: Car speed plotted on top of racing line viewer to compare 2018 and 2021 cars around Barcelona.
Going faster is great, but what we really want to see is more action! When F1 cars follow closely in an attempt to overtake they are affected by the aerodynamic wake of the lead car. This dirty turbulent air coming from the lead cars adversely effects the downforce generated by the front wing. This loss in front downforce causes an increase in mid corner understeer, which makes it difficult to stay close around the corner. F1 cars fundamentally suffer from mid corner understeer in low speed corners, as the setup and tyres are biased towards improving rear grip for traction and stability.
Front-axle KERS presents an opportunity to use torque vectoring on the front axle. By applying more torque to the front outside tyre we provide a yawing moment which helps to turn the car, and improves our exit traction. Torque vectoring on the front axle might reduce our dependence on aerodynamic grip in low and medium speed corners which could help the car stay close to the action when following in dirty air. To test this theory we ran our Dynamic Lap simulation. In Canopy it is easy to re-configure the powertrain, so adding a couple of motors to the front of the car is straightforward, and Dynamic Lap will optimally control these motors to find the perfect laptime.
If we are trying to follow another car closely through turns 7 and 8 in Barcelona to be within 0.5sec for the DRS detection zone, and we lose say 15% of the front downforce by being in dirty air, with our current regulations we lose 0.24sec. With front-axle KERS that loss in time is reduced to 0.16sec, which might provide an opportunity to overtake into turn 10. This performance difference is illustrated in Figure 2. The LHS shows the 2018 F1 car, while on the RHS is our proposed 2021 car with front-axle KERS. The faint lines show what happens when we lose 15% of the front downforce.
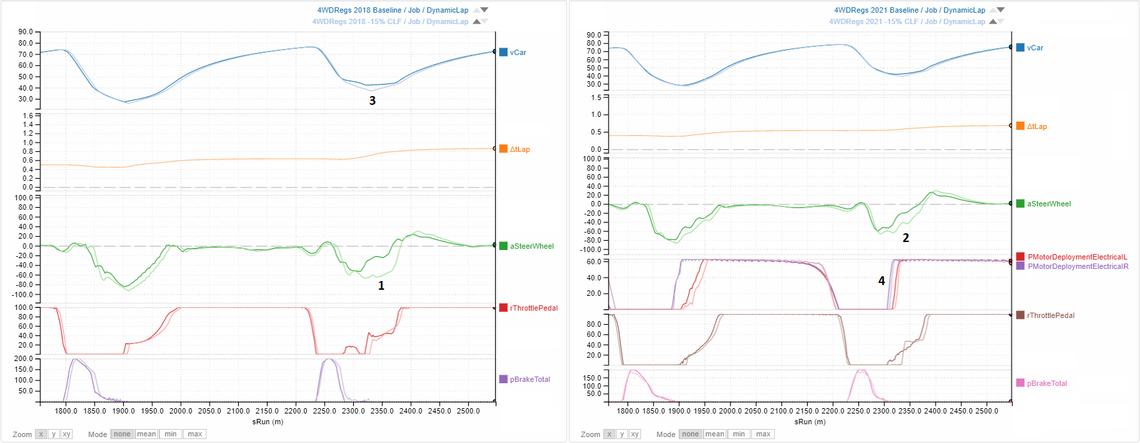
Figure 2: Effect of 15% loss in front downforce. Turns 5–8 in Barcelona. LHS = 2018 car, RHS: 2021 car.
Some interesting features from Figure 2:
If we compare steering angle at (1)&(2) we can see the 2021 car has significantly reduced mid-exit understeer when front downforce is compromised. This helps the 2021 car get a better exit and stay closer to the lead car. [There is an interesting secondary effect here: turning the steering wheel causes the car to lose aero, so by keeping it straighter we also gain downforce].
The 2018 car loses more mid corner speed (3) after a drop in front downforce. In low and medium speed corners we typically lose around 11kph with the 2018 car while this is reduced to 7kph if we introduce front-axle KERS.
At (4) we can see that the torque vectoring on the 2021 car applies power to the front right wheel early in the corner exit phase to get the car turned allowing the driver to get a much better exit.
Another advantage comes in terms of racing line choice. This can be seen by looking at the racing line through turn 10 in Barcelona in Figure 3
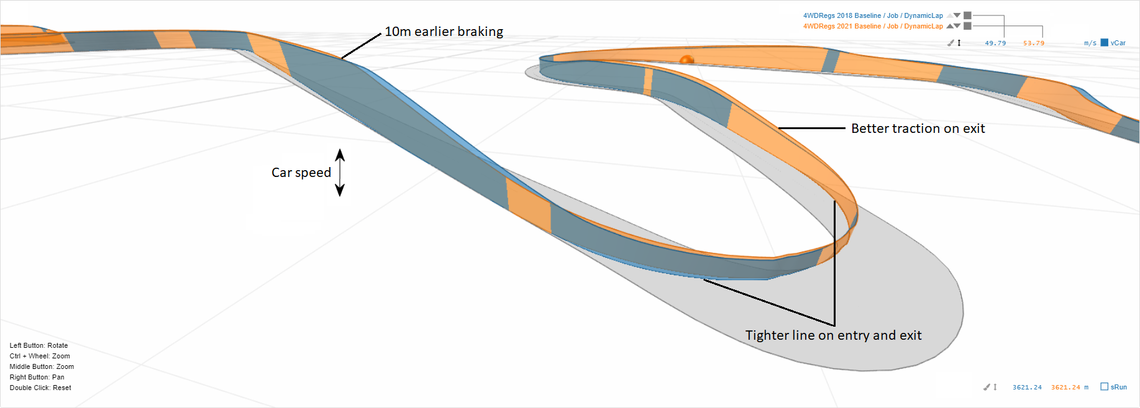
Figure 3: Racing line comparison. Blue = 2018 car, Orange = 2021 car. Height of ribbon = car speed.
With the current regulations (blue ribbon in Figure 3) the optimal racing line requires late braking down to a low speed, followed by a sharp turn in. However, with front-axle KERS (orange ribbon), the driving style is much smoother:
The ideal braking point is 10m earlier which allows the car to turn in early.
At mid corner the driver can start to feather the throttle which allows the front-axle torque vectoring to help maintain a tighter racing line.
On exit the driver can accelerate harder while maintaining a tighter line.
Why should we care about this difference in optimal driving style? In a race situation if cars are already braking as late as they possibly can, then it is difficult to out-brake competitors without going wide at the apex and losing out on exit. However, if the optimal braking point is 10m earlier then the lead car is faced with a dilemma; a) should they stick to the optimal line, or b) brake late (as per 2018 line) to defend their position?
We know that the 2021 car can brake as late as the 2018 car and still make the corner, so whichever option the lead car takes might present the following car with a competitive advantage. If the lead car picks a) and drives for minimum laptime, the following car could brake 10m later in an attempt to overtake and use the torque vectoring to help stay ahead on exit. Alternatively if the lead car picks b) and drives defensively, the following car could stick to the optimal 2021 racing line and get a laptime advantage thus slowly closing the gap and waiting for an overtaking opportunity.
There are also fuel savings to be gained from front-axle KERS. Over a race distance we would expect a saving of around 1.5kg in fuel by recovering additional kinetic energy during the brake zones, and providing better acceleration. If the cars are quicker they spend less time on the straights hence use less fuel. This gives another boost for teams with less efficient engines or aerodynamics as it will reduce the amount of fuel saving necessary and help close the gap to the best teams.
In summary, we found that front-axle KERS could make the cars go 2.2sec per lap quicker, while helping them to follow closely in dirty air. The new optimal racing line could open up opportunities for overtaking, plus there are fuel saving benefits which may help to improve competition by benefiting teams with less efficient cars. If you would like to learn more about 4WD and torque vectoring then the following article might be of interest: Front, Rear or All Wheel Drive at the Nürburgring Nordschleife?
By this point you can probably tell that we’re biased towards adding more exciting and road relevant technology to F1 cars which we can prove out in simulation. Over the coming weeks we are building an overtaking simulation which will be able to answer questions like this more objectively! If you have a great idea about how the F1 regulations should be changed then let us know and we’ll try to find out who it would help and how? Send us a message at hello@canopysimulations.com.