4 Wheel Steering is a Nightmare!
October 22, 2025
by Rowland Jowett
The Early Years
The late ’80s and early ’90s marked peak rivalry between charismatic Italian supercars and Japanese manufacturers responding with innovative tech. This era ushered in the start of four-wheel steering in performance cars. The premise was simple:
- At low speed, (below 50kph), the rear wheels turn opposite to the front wheels, reducing the turning radius.
- At high speed, (above 80kph), the rear wheels turn in the same direction as the front, to help with lane changes by crabbing and allegedly improving high-speed stability.
This made for captivating magazine articles on the 1987 Honda Prelude, Nissan Skyline GT-R (R32-R34) and Mitsubishi 3000GT. It was met with mixed reviews and scepticism, for example in this fascinating test carried out in the December 1987 issue of Car and Driver. Tested: The Four-Wheel-Steering Systems of 1988. The concept didn’t die, and it has been on and off performance cars such as the Porsche 911, Audi A6, A7, A8, BMW 5 and 7 series, Mercedes S-Class and GT. A more recent reincarnation is the Lamborghini Active Wheel Carrier, which can actively adjust camber by +2.5 to -5.5deg and toe by +/-6.6deg
The Honda Prelude Mk III rear wheel steering box is pictured below: a shaft from the front rack-and-pinion linkage drives a rear steering gearbox. In this implementation the rear wheels initially steer by 1.5deg in the same direction as the front, then over 246deg of steering lock (very low speed), the rear counter-steers up to 5.3deg.
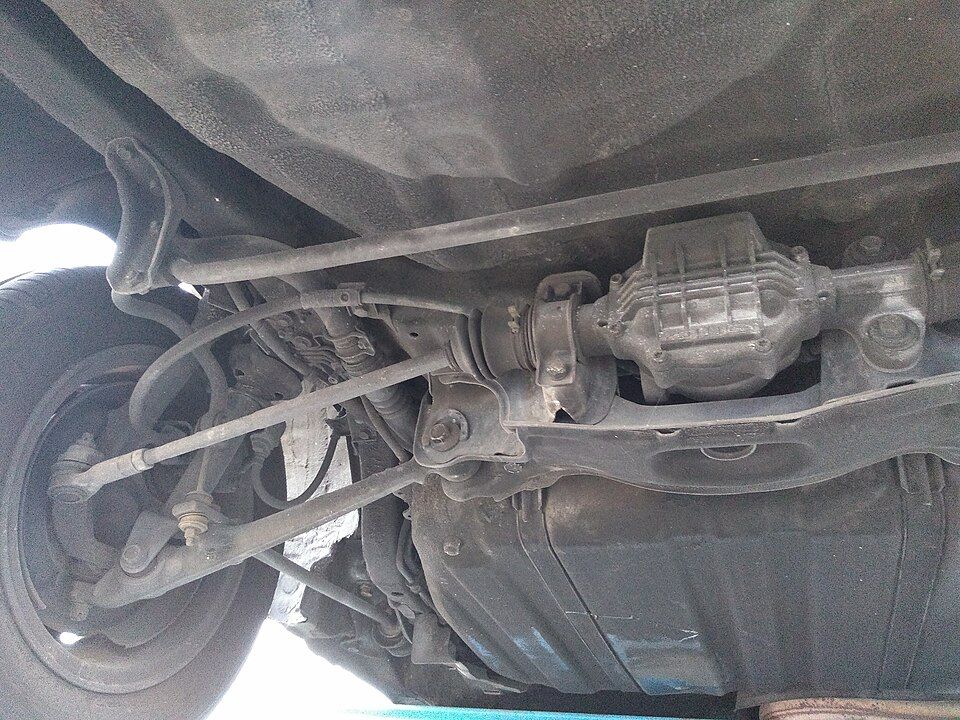
By Soyuz72 - Own work, CC BY-SA 4.0, https://commons.wikimedia.org/w/index.php?curid=75157825
Fully Optimal Control
Control of early systems was rudimental, so Canopy explored the question, what would happen if four-wheel active toe adjustment was connected to the vehicle model and optimal control was used to understand how one should deploy the system to minimise laptime. Fortunately, this is as simple as adding two virtual steering controls for each of the rear wheels and allowing the collocation solver to optimise their position around the lap, alongside the conventional front wheel steering.
Test Track
For reasons which will become apparent later, we’ll start by sending the cars around circular test tracks of increasing radius from 20m to 100m, which allowed for cornering speed varying from 60kph to 170kph with the Super GT car model.
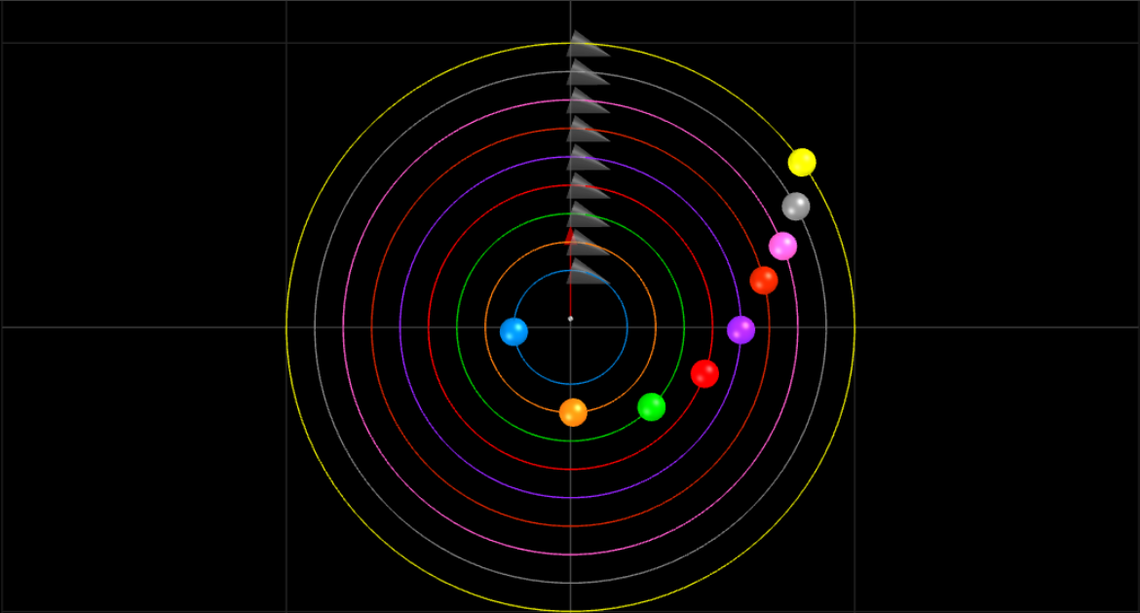
Circular test tracks for constant radius cornering
Results: Conventional Car
The rear wheels are fixed with a small constant toe-in at all speeds. From left to right in the graph below the track radius is increased so the car can go faster (blue line). At low speed on a tight radius track the front wheels (orange) must steer a lot, then as track radius increases less front steering lock is required.
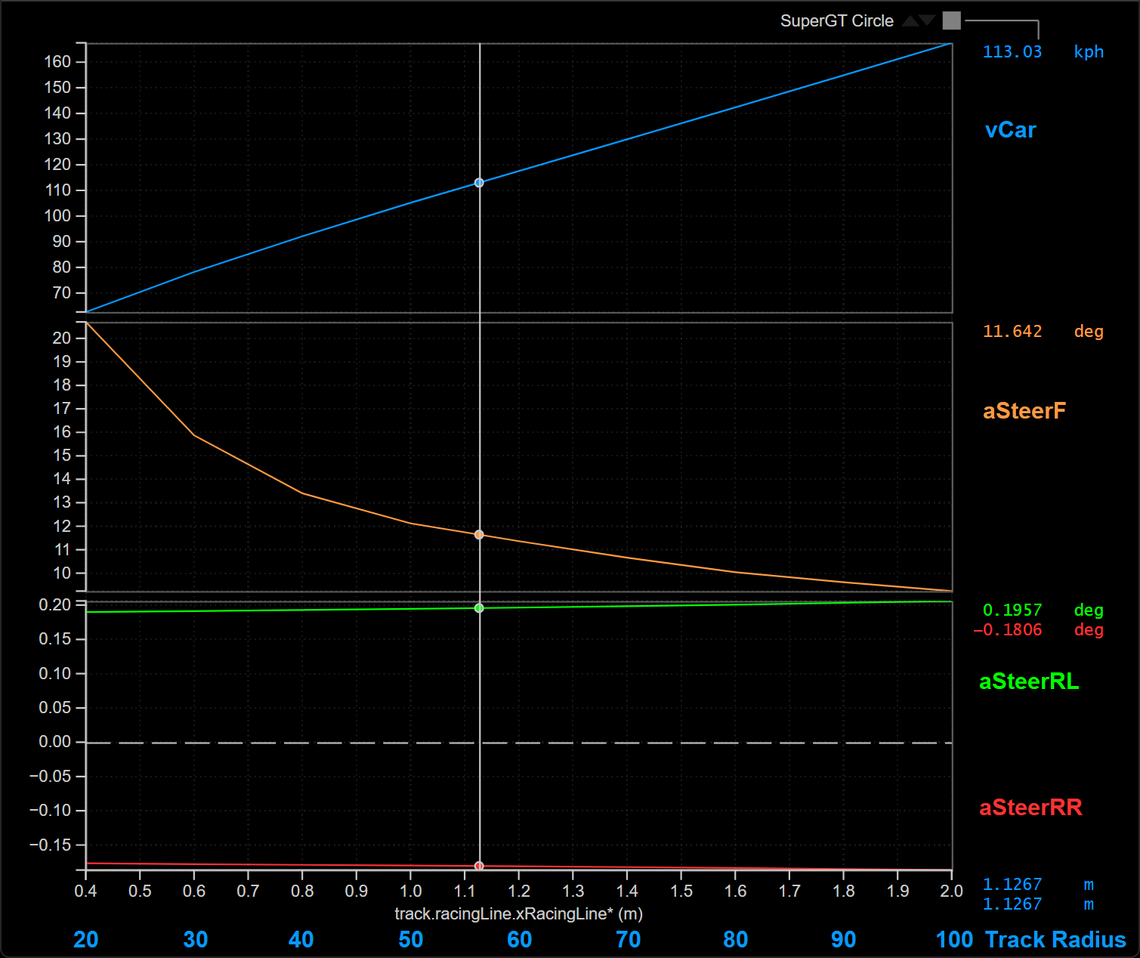
Conventional car with fixed rear toe-in, winds out front steering lock with increasing speed
Results: Rear Independent Steer Turned On
The rear wheel angle (green and red) is now picked by the solver. At low speed (below 113kph), the rear wheels are steering out of the corner in the opposite direction to the steering wheel. Above this speed, the rear wheels are steering in the same direction as the front. So far so good, all in keeping with how the early pioneers designed this system.
The front wheels don’t have to steer as much in low speed, as the rear steer is doing some of the work.
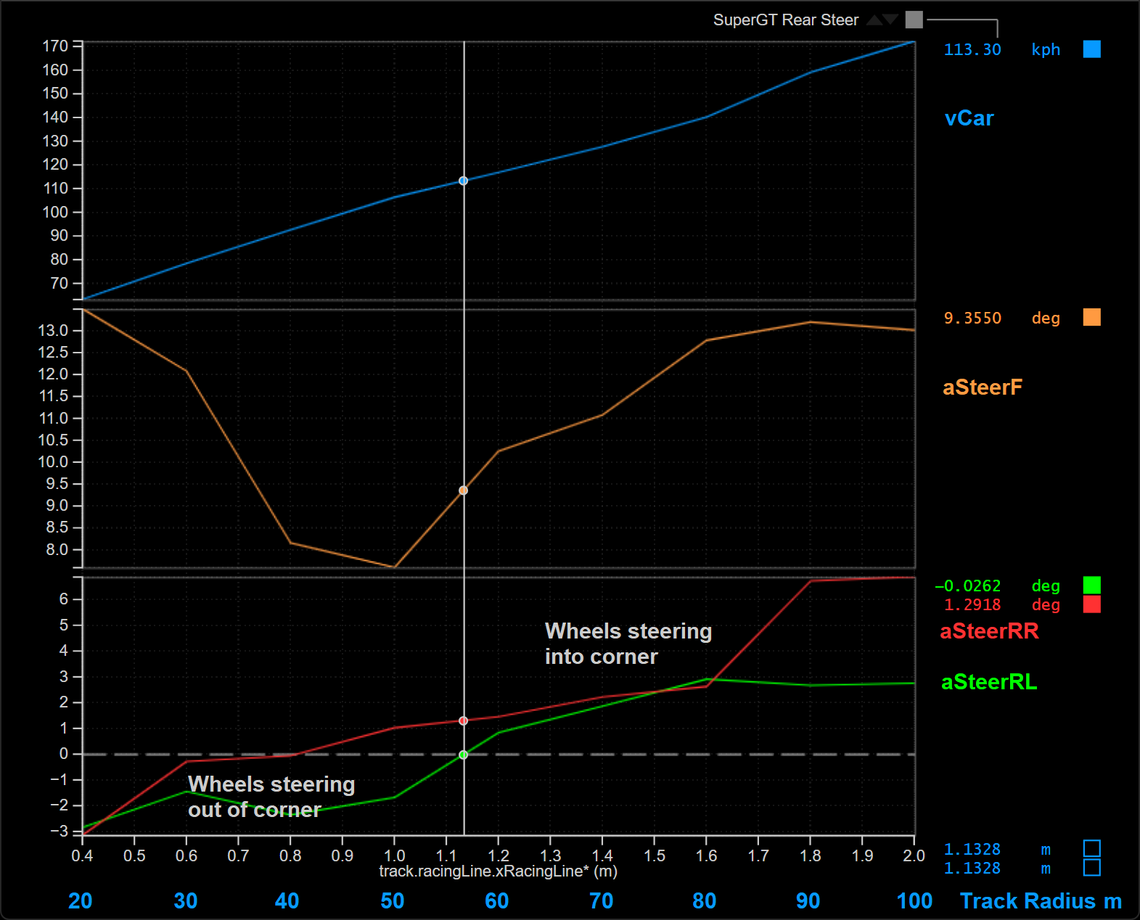
Independent rear steer for different radius circles
Performance Gain
Around a circle, the car is about 0.7% quicker averaged across all track radii. To match this improvement in pure cornering speed, the car’s mass would need to be reduced by 19 kg. The benefit of four-wheel steer seems larger at high speed than low speed. For context, Lamborghini’s active carrier reportedly adds 6.5 kg per corner, so the net gain is marginal, eroded further by the fact that this is unsprung mass.
At high speed, the rear inside wheel (aSteerRR in red) steers in by a significant 7degrees. This creates drag and a yawing moment on the car to help improve the cornering, similar to how ESP will brake the inside rear wheel to help rotate the car into the turn.
What happens if we change the balance?
It is straightforward in Canopy to set up a Monte Carlo simulation of combinations of Grip Balance x Track Radius. Grip Balance of +1% pushes the car balance towards oversteer, and is equivalent to 2% more front grip, and 2% less rear grip which is a sizable change.
Moving the sliders to the extremes of track radius, the optimum rear steering angle changes in the interactive graph below.
Low Speed
20m Radius @60kph
High Speed
100m Radius @170kph
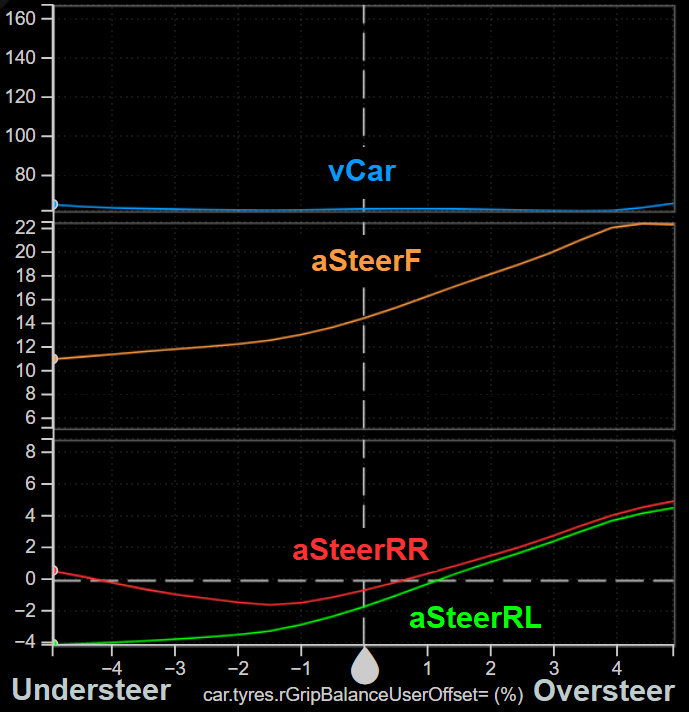
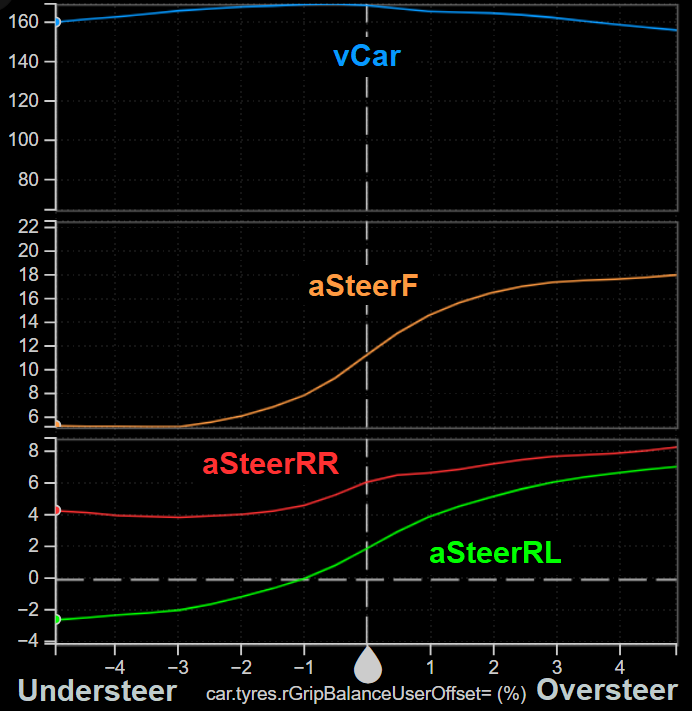
Two screenshots of the interactive graph, left is a low-speed corner, right is high-speed. Going from left to right along each x-axis represents a shift from understeer to oversteer.
The understeery car favours the rear outside tyre steering out of the corner to help with the tight radius. At extreme levels of understeer, the rear steering out persists even at high speed, although to a lesser extent.
The oversteery car favours the rear wheels steering in the same direction as the front wheels at all speeds.
How about Torque vectoring?
Regarding fancy devices that have the potential to improve balance and make the car go quicker, it would be remiss to not talk about torque vectoring. On an ICE car this is easily achievable in Canopy by turning on the torque vectoring diff, or for an electric powertrain enable two virtual throttle pedals, one for each rear corner.
With a torque vectoring car, the rear prefers to steer into the corner at all speed, and the above trend of the rear steering out at low speed disappears completely.
Conclusion
It’s extremely satisfying to see an optimal controller linked to four-wheel steering. With a conventional Super GT car, it does indeed steer the rear out of the corner at low speed and into the corner at high speed, just like the great ’80s/’90s sports cars.
BUT…
- It is very sensitive to car balance: a little oversteer and it’s no longer optimal to steer out of the corner.
- It changes with car topology: introduce torque vectoring on the rear axle, and it stops steering out of the corner.
- It is affected by car parameterisation: make a small mistake in the aeromap and the car might crab down the straight.
- It is not a strong performer: equivalent gain to reducing car mass by 19kg!
This goes some way to explaining why four-wheel steer is somewhat of a novelty.
Why is it fitted to some road cars?
This is speculation, but perhaps rear steer has more to do with human perception of sub-limit handling than circuit driving on the limit. In the same way as Ackermann steering geometry aims to avoid the tyres slipping while following a curve, perhaps four-wheel steer for a passenger car is setup with a similar philosophy.

By Ackermann.svg: User:Bromsklossderivative work: Andy Dingley (talk) - Ackermann.svg, CC BY-SA 3.0, https://commons.wikimedia.org/w/index.php?curid=11038290
Racing cars do not use Ackermann steering geometry; the side slip is so significant that the simple geometric assumptions in the image above fall over.
This theory can be tested in Canopy by imposing a speed limit on the car of around 2/3rd the maximum speed and introducing a constraint on tyre sliding energy. The solution then converges to 6deg of rear steer on the loaded wheel out of the corner in low speed, and 0.2deg out in high speed so the simulation is steering in a way to reduce slip i.e. it is steering out of the corner more than it would when focusing on pure laptime.
Another observation is that the front steering lock required when the rear wheels steer out of the corner is significantly reduced, perhaps giving the impression of a more responsive car during low-speed manoeuvres. It also allows the driver to steer more aggressively in high speed without destabilising the car, because when the rear steers in it effectively subtracts from the front steering. The result is less steering lock in low speed and more in high speed. These are human considerations, certainly not a concern for optimal control simulation.
Next Steps
At this stage the problem has been grossly simplified to look at a car going around a large roundabout on the limit. Spoiler alert: when the car is taken around a circuit, and the simulation must contend with car dynamics, the solution is far from the simple case shown here. The dynamics play a much greater role in what is happening, and it is clear that Dynamic Lap will be crucial in understanding the performance of such vehicles.
Comment below if you would like to see the craziness of four-wheel steer around a circuit, but don’t say I didn’t warn you…