Canopy Newsletter 8 – May 2018
MAY 14, 2018
An update on some new features that have been included in Canopy.
Channel Inference
A new simulation type is available. Working backwards from telemetry data, this simulation uses the vehicle model to estimate the value for channels which were not measured directly. It uses the quasi-static equilibrium of the car and an inverse tyre model to make these deductions.
Inputs
Track data or a laptime simulation can be staged as a telemetry config:
Required: timeBase, vCar, gLat, gLong.
Optional: aSteerWheel, aRockerXX or xDamperXX or xDamperPotXX (Channel Inference options used to select which optional channel to use).
What can Channel Inference be used for estimating?
Aero Loads ✓
Suspension Loads ✓
Tyre Loads ✓
Tyre Slips ✗
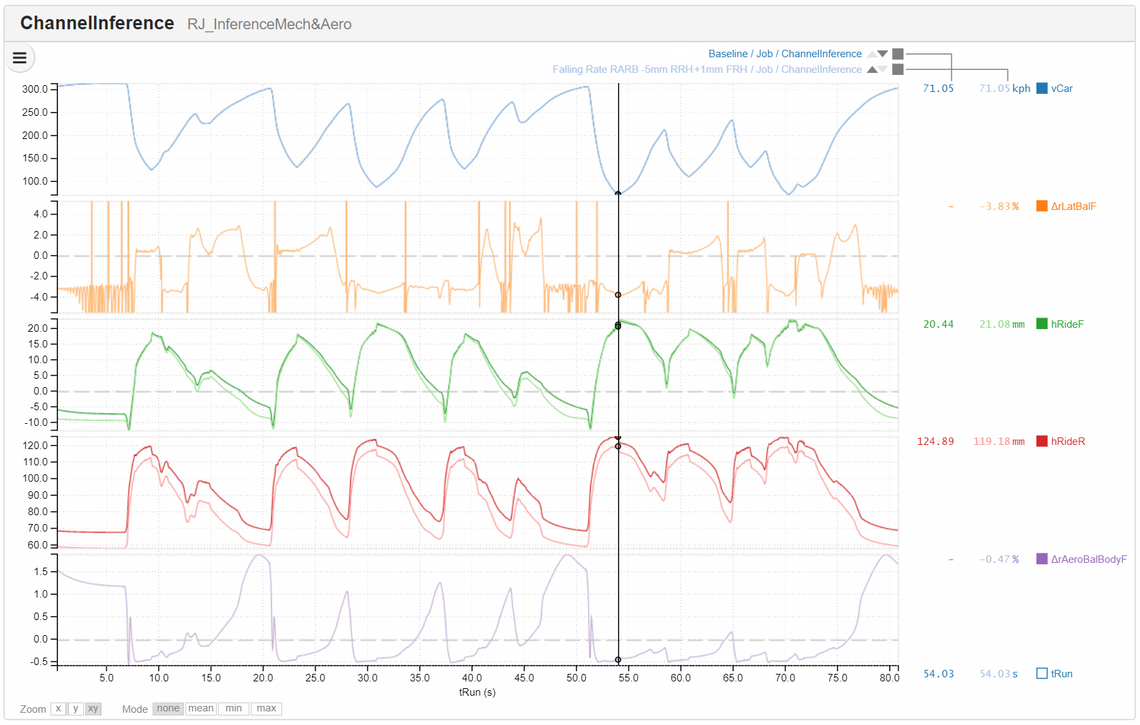
Channel Inference doesn’t have to be run on track data, a laptime simulation output can be staged as telemetry. In this way it is possible to look at the effect of small changes in car setup on balance, for example if two inference sims are run with different rear anti-roll bar rising rates on the same telemetry we could examine delta rLatBalF in the results to see how this might affect car balance at particular points around the circuit. While this is a simplification, because we wouldn’t achieve exactly the same vCar-gLat-gLong around the circuit after the setup change, it can be easier to interpret than a lap simulation, because the lap driven doesn’t change.
The example below shows a change to the rear anti-roll bar rising rate combined with a drop in rear ride height. We can look at delta rLatBalF and rAeroBalBodyF to deduce how these changes might affect through corner and high-low speed balance.
Brake By Wire
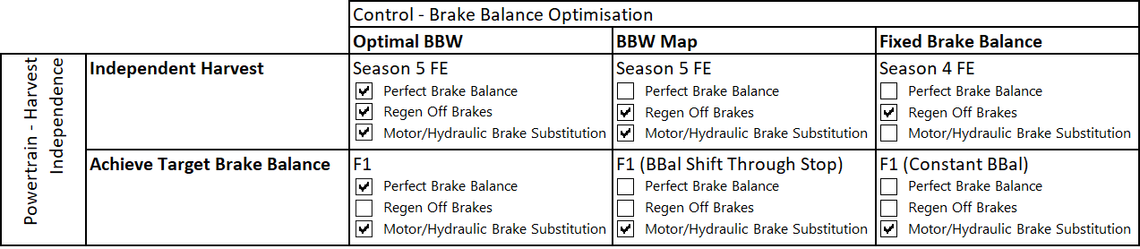
In the control section two new brake by wire modes have been added. Brake by wire makes it possible to substitute out hydraulic braking in favour of motor harvest. Where we are energy limited, motor harvest is prioritised while braking up to the motor torque/power limit, with any remaining demand met by the hydraulic brakes. Two BBW modes are available:
Optimal BBW. This effectively gives the car two brake pedals; one for the front, another for the rear, enabling the car to achieve perfect brake balance at all points during braking. This is a useful step in finding the ideal BBW map.
With the BBW Map, we can define rear brake pressure as a function of front brake pressure and/or steering wheel angle. An exploration could be used to vary any of the parameters in this map to examine the laptime effect of brake pressure shaping.
Combined with the relevant “Harvest Independence” option which enables/disables regen control separate to brakes & throttle, the relevant FE and F1 regulations can be simulated according to the table below.
Lower and upper bounds to brake balance can be specified for Optimal BBW.
Control of Sim Version
In case you want to fix sim version for an upcoming race/test to prevent routine upgrades from affecting your simulation results we have introduced user and tenant sim versions:
User Sim Version: Any individual can control their own simulation version irrespective of the tenant default.
Tenant Sim Version: A responsible/designated individual can control the default version for all users.
Once the race/test event has passed you can then upgrade at your own convenience.

Did you know…
When downloading results for a study, we’ve added options for you to quickly download just the most relevant file!