Canopy Newsletter 18 - December 2023
December 21, 2023
Welcome to Augustin Fontaine, Steven Granados and Pierre-Yves Mauriere
We are delighted that the Canopy team is expanding. Augustin brings with him half a dozen years of experience as motorsport tyre performance analyst working on measurements, thermo-mechanical modelling, off-line, DiL and track analysis. He is helping to support customers in getting the most out of the platform.
Steven has joined the software development team, and you might have already noticed that he has been busy ticking off a number of feature requests which bring some handy new functionality which you can read about in UI improvements below.
As a teaser of what might lie ahead, Pierre is helping to incorporate TameTire advanced thermal and mechanical model into Dynamic Lap. It is early days but we are encouraged by the initial progress that has been made and the future possibilities that lie ahead.
Ride Sim
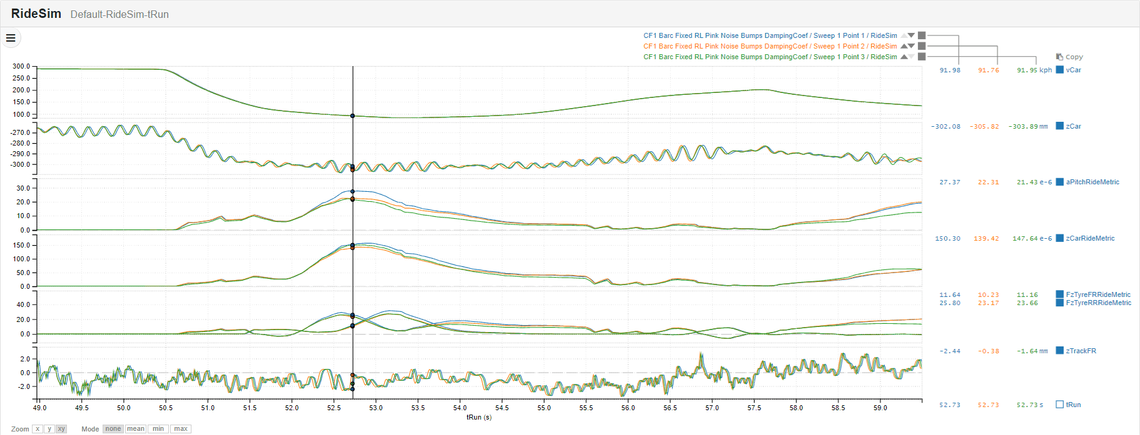
Historically, attempts have been made to add bumps to the track profile in Dynamic Lap to quantify the laptime effect of ride. This has been unsuccessful for two reasons: 1) It is difficult to get reliable convergence in Dynamic Lap when bumps are introduced. 2) We don’t necessarily believe the laptime gradient that Dynamic Lap delivers w.r.t. bumps is representative of reality, so perhaps unsurprisingly it is not quite as simple as changing the damper and expecting Dynamic Lap to quantify the laptime effect. However, there is another way; by driving your car over track bumps, ride metrics can be derived. If you have a car with known acceptable ride at the track, then you can work on setup changes to improve laptime while keeping an eye on ride metrics to check that they don’t deteriorate, or alternatively if ride is unacceptable at the track, this tool gives you the ability to improve it.
Ride Sim has been released to address the challenge of understanding the performance impacts of the vertical dynamics of the car. It uses a three-step process:
Run a Dynamic Lap with a car and track of the user’s choice [this is done by Ride Sim in the background, no need to run a separate Dynamic Lap].
Push the car around the vCar/gLat profile generated by the Dynamic Lap over a high-fidelity track surface, allowing the vertical dynamics to evolve freely. This enables us to capture all the effects of the track profile, inertial loads and aerodynamics.
Present the results to the user, along with some ride metrics, to apply their own engineering judgement.
The results of a Ride Sim, therefore, do not directly include lap time. What they do achieve is excellent lap-to-lap consistency between car configurations, enabling a good understanding of the impact of setup changes on ride behaviour.
Multi Factor Authentication
We have completed a major upgrade of our authentication system, which serves as a solid foundation for adding new authentication features in the future.
The first of these new features is multi factor authentication. You can enable this by going to your user settings in the Canopy Portal and clicking the “Enable Multi Factor Authentication” button. This will present you with a QR code that can be scanned my most multi factor authentication apps (Google Authenticator, Authy, 1Password, etc.). Multi factor authentication can also be disabled by your tenant admin should you need it disabled in an emergency.
As part of the upgrade, we have continued to support the legacy authentication method, technically known as “Password Flow”, where you post credentials to the Canopy API’s token endpoint. This allows all existing tooling written by our customers to continue to work as before, as well as the Canopy CLI and our Python Client Library. However, we don’t support multi factor authentication with Password Flow, and so enabling multi factor authentication for a user will disable Password Flow for that user. We will provide additional support and/or guidance for using multi factor authentication with custom tooling in the future.
UI Improvements
Thank you for all your great suggestions and upvotes on the Feature Requests board. We have been ticking through as many of these as we can, the highlights include:
Worksheet right-click enhancements: download a config which might be particularly useful for downloading cars to use in the DiL, compare telemetry, download results, copy and paste duplicate a row (rather than paste reference).
Stage All button. A new way to stage all inputs to a previously run Study without staging each individually.
Middle click to compare results in a new tab. If like me you like to use Canopy in multiple tabs it can be quite useful to middle click on Compare Results: Overlay to open this in a new tab.
Hide encrypted data when comparing configs, which could previously obscure the differences that were of interest.
Modify the priority of a Study relative to others that might be running. In the view study page, high priority will pause other studies until that one is finished, while low priority will pause the study until all other studies have complete.
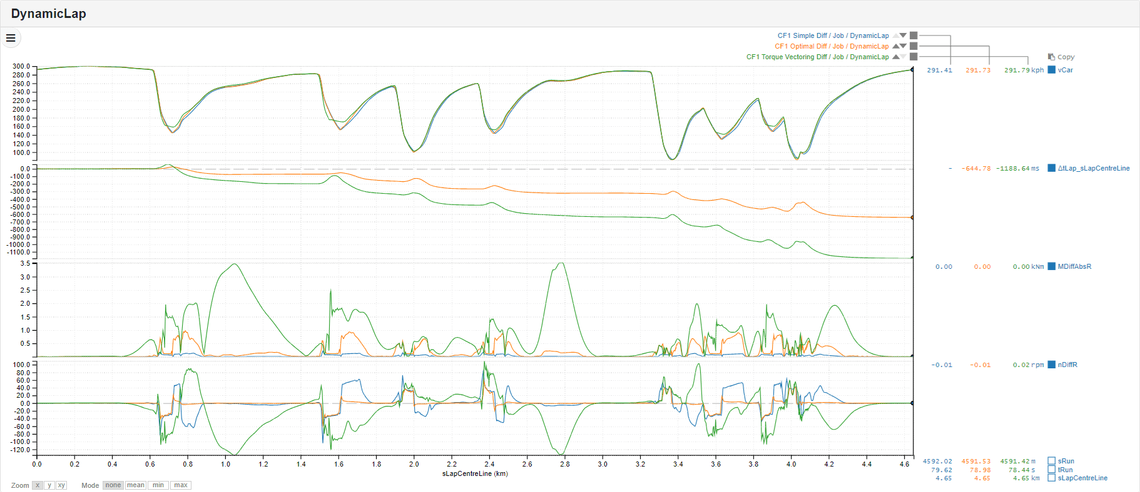
Torque Vectoring Diff
It has been possible to do torque vectoring with electric motors by selecting Transmission Connection = Direct Drive Pair and Motor Controller = Independent Axle Pair, which allows two virtual throttle pedals, but this doesn’t work for ICE cars. This diff option now allows torque vectoring diff allows this for ICE cars (and another method for electric ones).
In addition, it is planned to add a torque vectoring central diff.
Did you know…
The speed of Dynamic Lap has been improved through a number of optimisations to make it run 34% quicker.
Rate limits in Control are possible to limit brake and throttle application rate, while Motor Limits/Slew Rates can alter the motor deployment and harvest rate.
We hope you enjoy using these new features.
Let us know if you have any questions or comments.
Your Canopy Team